- Beranda
- Komunitas
- Hobby
- Hobby & Community
Line Follower Si Robot Pemula
TS
surayrus
Line Follower Si Robot Pemula
Agan tertarik sama dunia robotik? Ingin belajar lebih dalam tentang robotik? Jangan khawatir gan! Disini ane mau bahas tentang robot yang biasa dibuat oleh pemula, namanya Line Follower Robot. Apaan tuhhh???
Mungkin bisa dibilang Line Follower Robotini kayak mobil-mobilan, atauuu.... mirip Tamiya lah ya. Kalian tau Tamiya kan? Yap. Mainan mobil-mobilan yang dapat melaju kencang menggunakan baterai. Tapiii, Line Follower Robot ini berbeda gan. Bedanya, Line Follower Robot akan berjalan mengikuti garis yang kita buat secara otomatis.

Untuk membuat robot, ada tiga komponen utama yang harus dikerjakan gan. Apa aja tuh? Simak penjelasannya di bawah ini yaa!!
1. Elektrik
Hal paling mendasar adalah komponen elektrik. Agar robot kita dapat berjalan maka dibutuhkan komponen elektrik yang terhubung satu sama lain dan dialiri tegangan. Pada Line Follower Robotini dibutuhkan beberapa komponen elektrik utama, yaitu :
· Line Sensor
· Driver Motor

· Mikrokontroler

· Aktuator

2. Mekanik
Mekanik juga menjadi hal yang penting loh gan. Komponen-komponen elektrik yang sudah ada akan diletakkan pada mekaniknya. Mekanik ini berfungsi sebagai bentuk fisik robot secara keseluruhan gan. Saat mendesain mekanik suatu robot, agan agan harus menyesuaikan bentuk dan ukuran dengan komponen-komponen lain. Disini agan agan bisa berekspresi ria, membuat desain mekanik seeeekreatif mungkin, tapi tetap harus dipikirkan agar robot nya seimbang ya gan, sehingga dapat berjalan dengan baik.



3. Program
Komponen elektrik? Sudah.
Komponen mekanik? Sudah.
Penggabungan elektrik dan mekanik? Sudah.
Sudah bisa jalan? Belum
Terus diapain donngg???
Naah, tahap selanjutnya agar robot bisa berjalan adalah pemrograman. Yapp.. Disini agan harus memrogram robot sesuai fungsi robot itu sendiri. Nah, melalui programlah kita mengatur pergerakan robot kita. Misalnya saat menemukan garis hitam di tengah robot, maka kita program agar robot berjalan lurus. Ketika menemukan garis hitam di sisi kanan robot, maka kita program agar berbelok ke kanan dengan mematikan motor sebelah kiri, begitupun sebaliknya.

Kurang lebih begitu gan hal-hal penting dalam membuat line folllower robot.
Kalau 3 tahap utama diatas sudah agan kerjakan dengan baik, maka......

Gimana gimana?
Tertarik mendalami dunia robotik?
Pokoknya agan kudu harus wajib pake banget dehh nyobain bikin line follower robot.
Soalnya ini robot paling dasar banget gan.
Selamat Mencoba Gan!
Mungkin bisa dibilang Line Follower Robotini kayak mobil-mobilan, atauuu.... mirip Tamiya lah ya. Kalian tau Tamiya kan? Yap. Mainan mobil-mobilan yang dapat melaju kencang menggunakan baterai. Tapiii, Line Follower Robot ini berbeda gan. Bedanya, Line Follower Robot akan berjalan mengikuti garis yang kita buat secara otomatis.
Untuk membuat robot, ada tiga komponen utama yang harus dikerjakan gan. Apa aja tuh? Simak penjelasannya di bawah ini yaa!!
1. Elektrik
Hal paling mendasar adalah komponen elektrik. Agar robot kita dapat berjalan maka dibutuhkan komponen elektrik yang terhubung satu sama lain dan dialiri tegangan. Pada Line Follower Robotini dibutuhkan beberapa komponen elektrik utama, yaitu :
· Line Sensor
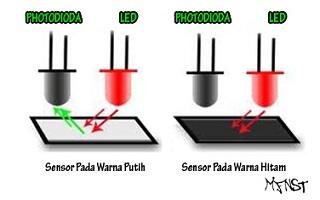
Line Sensor bekerja sebagai input gan. Ini berupa sensor yang dapat mendeteksi adanya garis. Jadi robot akan mendeteksi garis dan akan mengikuti garis tersebut sebagai penunjuk arah. Sensor yang digunakan adalah photodioda. Photodioda akan diletakkan berdekatan dengan LED dan membaca cahaya yang dipantulkan oleh LED. Jadi LED dan photodioda ga boleh ada yang memisahkan ya gan, harus selalu bersama!
https://masnasir.files.wordpress.com/2012/05/sensor-garis.jpg
· Driver Motor
Driver Motor adalah salah satu komponen elektrik yang wajib digunakan. Agar kita dapat mengontrol kecepatan serta arah perputaran aktuator, maka kita memerlukan driver motor. Misalnya, kalau ketemu garis item maka motor melaju kencang, tapi kalo ketemu bidang putih maka kecepatannya melambat. Yaa, begitulah kurang lebih...
https://bookmyparts.com/wp-content/uploads/2016/10/L293D-Motor-Driver.jpg
· Mikrokontroler
Data yang dihasilkan oleh line sensor akan diolah dan kemudian dikirim ke driver motor. Data tersebut akan diolah oleh chip yang bernama mikrokontroler. Biasanya agan-agan dapat menggunakan Arduino sebagai mikrokontroler. Namun, jika agan ingin mencoba membuatnya, agan bisa membuat sismin (sistem minimum) menggunakan ATmega. Sismin adalah rangkaian mikrokontroler yang paling sederhana agar dapat bekerja dan di program.
https://upload.wikimedia.org/wikipedia/commons/thumb/3/38/Arduino_Uno_-_R3.jpg/220px-Arduino_Uno_-_R3.jpg
· Aktuator
Kalau aktuator ini penggerak gan. Untuk line follower aktuatornya menggunakan motor. Jadi hasil olahan mikrokontroler yang dikirim ke drivermotor akan diteruskan ke aktuator dalam bentuk energi fisika.
https://www.makerlab-electronics.com/my_uploads/2017/05/dc-gear-motor-sgm37-555E-12v-2.jpg
2. Mekanik
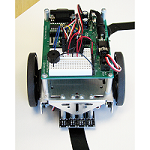
Mekanik juga menjadi hal yang penting loh gan. Komponen-komponen elektrik yang sudah ada akan diletakkan pada mekaniknya. Mekanik ini berfungsi sebagai bentuk fisik robot secara keseluruhan gan. Saat mendesain mekanik suatu robot, agan agan harus menyesuaikan bentuk dan ukuran dengan komponen-komponen lain. Disini agan agan bisa berekspresi ria, membuat desain mekanik seeeekreatif mungkin, tapi tetap harus dipikirkan agar robot nya seimbang ya gan, sehingga dapat berjalan dengan baik.
https://www.google.co.id/search?q=robot+line+follower&rlz=1C1GCEB_enID821ID821&source=lnms&tbm=isch&sa=X&ved=0ahUKEwj_tsf3y9XeAhXNzmEKHWC-Bd4Q_AUIDigB&biw=1366&bih=577#imgrc=vGIqP0DJ-zEspM:
3. Program
Komponen elektrik? Sudah.
Komponen mekanik? Sudah.
Penggabungan elektrik dan mekanik? Sudah.
Sudah bisa jalan? Belum
Terus diapain donngg???
Naah, tahap selanjutnya agar robot bisa berjalan adalah pemrograman. Yapp.. Disini agan harus memrogram robot sesuai fungsi robot itu sendiri. Nah, melalui programlah kita mengatur pergerakan robot kita. Misalnya saat menemukan garis hitam di tengah robot, maka kita program agar robot berjalan lurus. Ketika menemukan garis hitam di sisi kanan robot, maka kita program agar berbelok ke kanan dengan mematikan motor sebelah kiri, begitupun sebaliknya.
https://miro.S E N S O Rmax/1002/1*3jt6JNPXbt95Wq5CCJOaeA.jpeg
Kurang lebih begitu gan hal-hal penting dalam membuat line folllower robot.
Kalau 3 tahap utama diatas sudah agan kerjakan dengan baik, maka......
Jadi dehhh, Line Follower Robot kayak gini nihhhh.
Gimana gimana?
Tertarik mendalami dunia robotik?
Pokoknya agan kudu harus wajib pake banget dehh nyobain bikin line follower robot.
Soalnya ini robot paling dasar banget gan.
Selamat Mencoba Gan!
Diubah oleh surayrus 15-11-2018 18:09
1
2.2K
0
Komentar yang asik ya
Komentar yang asik ya
Komunitas Pilihan