gan beda multiwii dev r1240 sama multiwii 2.1 apa ya gan ..? yang paling signifikan itu fitur altitude holdnya gan via barometer
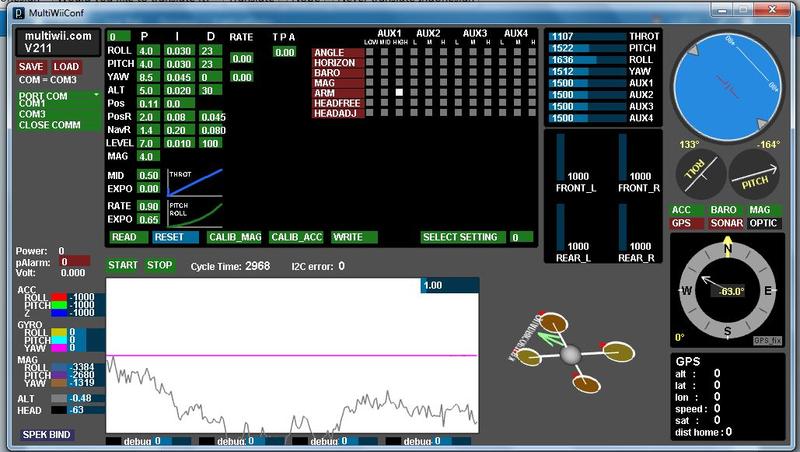
Gan itu abis di flash belum di calibrasi kayanya, klik 2 tombol itu dulu. kalib ACC cukup letakkan quadnya level kalib MAG puter 360 derajat quad tiap axis, total 3 axis Biar Wii ARM kondisi ini harus terpenuhi gan, setting remot end point ? remot ane THR full down 1090 YAW full kanan 1910
siap bro, ane udah ketemu masalahnya dimana bro, btw, ane skrg make MultiWiiConfig 2.0, dan uda di load program v2.0 dari http://code.google.com/p/multiwii/downloads/detail?name=MultiWii_2_0.zip&can=2&q= masalahnya ane ga bs nge arm board ini, apakah agan tau stick combination untuk nge-
bro, kalo GUI nya multiwii yang seperti di web ini http://www.geeetech.com/wiki/index.php/MultiWii_Multi-Copter_Flight_Control_Board bedanya apa ya gan? apakah ada pencerahan dengan bagaimana membuat status ON pada accelerometernya? soalnya di GUI ane, smua statusnya OFF gan, dari NUNCHUK, ACC
wah thanks gan pencerahanya maturnuwun banget hehehe itu jadi saya tinggal mengganti longtitude dan latitude yang ane mau ya gan? kalo yang waypoint1 itu berati untuk koordinat buat RTH ya gan ? atau gimana ya gan ? dan saat mision plan diaktifkan apa juga haru hold untuk menjaga ketinggianya
sori gan, baru in ane ... Setting WP dilakukan di firmwarenya wii 2.1 ya jadinya tiap kali upload wp ato ubah harus flash wii nya terus. Kalo saya bikin file baru gan, terserah namanya. saya bikin file baru "WP.ino" dan di insert di arduinonya barengan file-file multiwii, IMU, GPS, dll...
input WP masih manual itu gan, jadi harus reflash FC jika pengen gonta-ganti WP, masih coba edit program Eosbandi itu MultiWii WinGUI biar bisa edit/input WP dari program tanpa harus flash FCnya lagi. mungkin seperti ini gan, butuh bantuan teman2 yang bisa C#, source make ini. Editan saya baru s...
mastah disini gps saya dari rc timer v2 untuk neo 6m 001 via i2c nav modul,e kok blum bisa aktif ya sudah saya pakai multiwii 2.1 dan firmware nav module sudah pakai yanbg terakhir yang katanya tanpa solder lagi saya juga menggunakan cara dari eos bandi juga lkum bisa bekerja gps nya bener ga
Misi, numpang gabung suhu-suhu, need suggest for settingan wii untuk altHold, masih suka naek turun. @ gan nunchaku, waw manteb gan design2 framenya mana make carbon lagi. gan bisa bantu untuk potong ? ane ada design sendiri untuk FPV. Trims
Gan ane udah bisa bikin file binnya make venus 18t yang item n udah kedetek di tp link thanks gan infonya
Iya gan udah sesuai nih ane juga punya pengalaman sama gan, quad ane kaga terbang2, pusink ane, terus ane flash dah make versi laen, udah terbang sekarang mantep om budi quadnya bisa maen aer lagi, frame make alumunium ukuran berapa om, ane juga lagi bikin framenya make hollow 17x10. Prop kyn...
salam kenal gan, hehehe ... kita sesama penggungan HK juga nih, mumer. klo ane ngetestya quadcopternya di pegang gan prop di copot aja, throttlenya dikit aja sampe semua motor muter, udah gitu di miring2 deh kita liat apa counter dari motor udah sesuai ama pergerakan wahana kita. klo gak salah ...
bisa jadi gyro emank reverse gan, palink enak agan test pegang ntuh QC trus miring2in n puter2, nah puteran motor harusnya selalu counter dari pergerakan QCnya ex : pas qc dimiringin ke kanan motor counter ke kiri, dsb, ato cba cek puteran propnya gan, pan ada aturannya tuh. ato bisa cba2 beber...
Iya om,,, CG emang no 1, hehehe ... HK quadcopter saya yang pertama terbang drift mulu ke belakang, walhasil jempol kanan cape buat counter, jadinya di trim aja deh. om caraka mo tanya, klo X8 kira2 panjang arm ideal berapa yah dari pusat (CG) trus puteran baling2nya ?, apa sama kya QUADX :bingu...
Manteb om nemu video di yutub, Wii bisa toleransi beda beban di tiap lengannya http://youtu.be/iKc6kj6evmw?t=2m54s