- Beranda
- Komunitas
- Entertainment
- The Lounge
Robot Big Dog dikembangkan hingga saat ini untuk kepentingan militer
TS
c4punk1950...
Robot Big Dog dikembangkan hingga saat ini untuk kepentingan militer
Quote:
Robot guguk, mbah pikir mirip guguk taunya tak mirip sama sekali hanya saja berkaki empat bak hewan yang lincah gerakannya.

BigDog adalah robot yang mempunyai kaki empat. Robot ini dibuat oleh Boston Dynamic yang dapat berjalan, berlari, dan memanjat di medan yang sulit dengan membawa beban berat. BigDog didukung oleh mesin berbahan bakar bensin yang menggerakkan sistem hidrolik.

Pendanaan untuk robot ini dilakukan oleh Defense Advanced Research Projects Agency (DARPA). BigDog ini dibuat juga agar bisa membantu pasukan dalam peperangan dan dalam kondisi urgent.
BigDog ini diciptakan dengan tujuan untuk membuat suatu kendaraan yang berkaki. Serta memiliki kemampuan pergerakan di jalur kasar maupun sulit. Robot ini akan cukup pandai untuk mampu memilih jalur yang terbaik dengan bantuan ataupun intervensi dari manusia secara minimal.
Robot BigDog adalah sebuah prototype berbentuk robot yang memiliki empat kaki. Pada mulanya dikembangkan oleh Boston Dynamics untuk keperluan militer. Robot ini mampu membawa beban melebihi bobot tubuhnya sendiri yang memililki berat tubuh sekitar 109 kg(240 lbs), dengan tinggi 1 meter, panjang 1,1 meter dan lebar 0,3 meter. Selain itu juga robot ini mampu menjaga keseimbangan dengan baik, sehingga dapat berjalan disemua jenis medan bahkan medan-medan yang terjal dan berat sekalipun. Robot ini juga mampu berlari dengan kecepatan 5 mph.

Robot ini mampu menjaga keseimbangannya di medan terjal karena menggunakan logika keseimbangan. Logikanya seperti waterpass tetapi dengan menggunakan cairan berupa oli di dalam tabungnya, sehingga robot ini harus menyeimbangkan oli di dalam tersebut agar tetap seimbang sehingga keempat kaki dari robot tersebut akan berusaha untuk menjaga posisi agar keadaan seimbang oli tersebut terjaga, sehingga dengan patokan tersebut sang BigDog akan terjaga dari ketidakseimbangan yang dapat menyebabkan tubuhnya oleng/tersungkur. Dengan beberapa kombinasi pengkodingan (Fuzzy Logic) yang sangat rumit, hal ini memungkinkan untuk memerintah robot agar selalu menjaga keseimbangannya dengan waterpass berisi oli, sepertinya robot ini akan menjadi penolong para prajurit dalam medan perang. Intinya, program dari robot ini mengharuskan si BigDog untuk selalu menjaga patokan yang diberikan sang programmer agar tetap sesuai dengan manfaat dan fungsi dari robot itu sendiri.
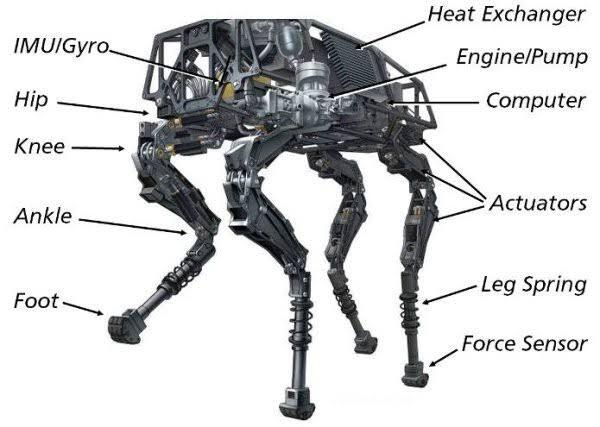
Cara Kerja Sistem Big Dog
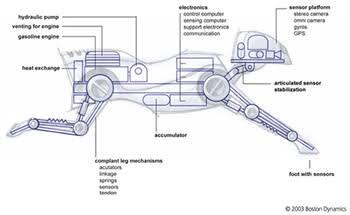
Kaki yang dimiliki oleh robot ini akan memiliki 4 aktuator hidrolik yang menggerakkan secara bersama. Sebuah heat-exchanger di pasang pada badannya untuk mendinginkan oli hidrolik dan sebuah radiator untuk mendinginkan mesin agar dapat menjaga mesin dapat bekerja dengan baik. Sistem onboard ini mengkontrol pergerakan BigDog, mengatur sensor dan menangani komunikasi dengan operator manusia dari jarak jauh.
BigDog ini memiliki sekitar 50 buah sensor. Diantaranya sensor inertial dan sensor join (bersama). Sensor inertial yaitu mengukur pergerakan dan kecepatan dari badan robot BigDog.
Sedangkan sensor join yaitu mengukur pergerakan dan gaya dari aktuator yang bekerja padanya. Jika kita menggabungkan sensor-sensor ini menggunakan sistem onboard maka akan diperoleh bahwa ini bis digunakan untuk menciptakan agar robot ini bisa bergerak di dalam ruangan.
Robot BigDog ini belum mampu memandu dirinya sendiri. Sampai sekarang robot ini masih dipandu oleh operator. Operator yang dimaksud disini adalah operator yang menjalankan melalui OCU (Operator Control Unit).
Operator ini dapat berkomunikasi dengan robot melalui IP radio yang sudah disediakan. Fungsi dari OCU ini yaitu dapat mengarahkan dan mnggerakkan arah dari robot ini, bahkan juga dapat membuat mesin ini dimatikan atau dihidupkan. OCU ini juga dapat mengatur robot agar bisa berjalan, berdiri, berhenti, menunduk, berlari dan sebagainya.
BigDog saat ini memang sangat ketergantungan sekali pada seorang operator yang membimbingnya melalui suatu jalur IP radio. Untuk selanjutnya akan di usahakan agar robot BigDog ini bisa bergerak, berjalan dsb menggunakan komputer vision, LIDAR dan GPS. Sehingga robot BigDog ini bisa bergerak dan menjalankan dirinya sendiri tanpa panduan dari OCU lagi.
Program pada robot BigDog ini di rancang untuk dapat menerima rangsangan dengan sensor-sensor yang diletakkan pada pergerakan kaki bigdog itu sendiri. memanjat dengan sudut kemiringan 35o, dan berjalan melintasi bongkahan-bongkahan, berjalan melewati tanah yang berlumpur, dan berjalan melewati jalan yang licin.
Kehebatan lain dari robot ini juga dapat menjaga keseimbangan badannya sendiri sehingga mengkondisikan robot ini agar tidak jatuh terpeleset. Dalam video yang di unggah oleh pihak pengembangnya sendiri yaitu, Boston Dynamics, robot yang sedang berjalan tersebut di berikan tekanan sehingga robot tersebut oleng atau tidak seimbang , tetapi hebatnya dari robot ini ditampilkan segera dengan mengatur posisi berdirinya sehingga robot tersebut hanya oleng dan mampu berdiri lagi dengan waktu yang terbilang cukup cepat. Ini merupakan salah satu penggunaan dari soft computer, yaitu diganakan sebagai otak robot.

Big Dog sebagai Rational Agent memiliki komponen berikut, yaitu :
P (performance measure) : Dapat berjalan, Memanjat, Berjalan melintasi area yang ditentukan, Membawa beban, Seimbang
E (environment) : Jalanan Bongkahan-bongkahan, Tanah Lumpur, Jalanan Licin
A (actuators) : Pergerakan kaki robot (System Hidrolik), Berjalan, Memanjat, Membawa Beban, Sistem Onboard, OCU (Operator Control Unit)
S (sensors) : GPS, Battery Voltage, Ring Laser Gyro & Linear Accelerometers, Engine Temp & Speed, Hydraulic Pressure, Flow & Temp, LIDAR, Stereo Vision, Joint angles & forces
Adapun Properties of Environment pada Big Dog adalah sebagai berikut :
Fully Observable VS (Partially observable) : Big Dog merupakan Partially Observable karena pemrosesan sensor – sensor dilakukan secara parsial oleh operator mengirim hasilnya ke mesin big dog
Deterministic VS (Stochastic) : Big Dog merupakan Stochastic karena keadaan lingkungan berikutnya sepenuhnya ditentukan oleh keadaan sekarang dan tindakan yang dilaksanakan oleh agen.
(Jika lingkungan itu deterministik kecuali untuk tindakan agen-agen lain, maka lingkugannya adalah strategic)
Static VS (Dynamic) : Big Dog merupakan Dynamic karena lingkungan tidak berubah selagi agen direncanakan (deliberating). (Lingkungan adalah semidynamic jika lingkungan itu sendiri tidak berubah dengan berjalannya waktu tetapi performa agen berubah)
Episodic VS (Sequential) : Big Dog merupakan Episodic karena pengalaman agent dapat dibagi menjadi tahapan-tahapan yang kecil dimana agent akan menerima dan melakukan satu tindakan. Pilihan tindakan tergantung hanya pada episode itu sendiri.

Discrete VS (Continuous) : Big Dog merupakan Continuous sejumlah terbatas persepsi dan tindakan yang khas dan terdefinisi baik. Pemrosesan datanya bersifat berkelanjutan
Single Agent VS (Multi Agent) : Big Dog merupakan Single Agent karena dapat merespon setiap perintah dari satu operator, dan tidak bisa merespon lebih dari satu operator

Robot Big Dog merupakan Goal-Based Agent karena dapat memperluas pada kemampuan model-based agents, dengan menggunakan “goal” informasi. Tujuan informasi menggambarkan kondisi yang diinginkan. Hal ini memungkinkan agen cara untuk memilih di antara beberapa kemungkinan, memilih satu yang dapat membantu mencapai tujuan. Search dan planning adalah sub pada bidang kecerdasan buatan yang ditujukan untuk urutan tindakan menemukan mencapai tujuan agen. Goal-Based Agent lebih fleksibel karena pengetahuan yang mendukung keputusan yang diwakili secara eksplisit dan dapat dimodifikasi.
Referensi
sumber
0
14.8K
68
Komentar yang asik ya
Urutan
Terbaru
Terlama
Komentar yang asik ya
Komunitas Pilihan