- Beranda
- Komunitas
- Entertainment
- The Lounge
Mengenal Robot Line follower / Line tracker (+PIC)
TS
oktav14
Mengenal Robot Line follower / Line tracker (+PIC)
") Misi gan disini ane mau share tentang robot line follower/line tracker
Misi gan disini ane mau share tentang robot line follower/line tracker
Spoiler for :
semoga ngga 
Spoiler for Apa itu robot Line Tracker?:
Spoiler for Komponen Robot Line Follower:
1.Sensor Proximity
prinsip kerja Sensor proximityyaitu memanfaatkan sifat cahaya yang akan dipantulkan jika mengenai benda berwarna terang dan akan diserap jika mengenai benda berwarna gelap.untuk membuatnya kita bisa gunakan sumber cahaya kita dapat menggunakan LED berwana merah,dan untuk menangkap pantulan cahaya LED kita gunakan photodioda.jika sensor berada diatas garis hitam ,maka photodioda akan menerima sedikit cahay pantulan,lalu saat di garis putih (lantai) maka photodioda akan menerima banyak cahaya pantulan.
untuk ilustrasinya :

sifat dari photodioda adalah jika semakin banyak cahaya yang diterima maka nilai resistansi diodanya semakin kecil.dengan modifikasi sedikit maka besaran resistansi tersebut dapat diubah menjadi tegangan.dengan demikian,jika sensor berada di garis hitam,maka tegangan keluaran sensor akan kecildemikian juga sebaliknya gan.
gambar rangkaian sensor proximity yang digunakan pada robot ini :
 agar dapat dibaca oleh mikrokontroler maka tegangan sensor harus disesuaikan disesuaikan dengan level tegangan TTL,yaitu 0-1 Volt untuk logika 0 dan 3-5 untuk logika 1,hal ini bisa dilakukan dengan memasang operasional amplifier yang difungsikan sebagai komparator.output dari photodioda ini yg masuk ke input inverting op-amp akan dibandingkan dengan tegangan tertentu dari VR (Variabel Resistor).Teganagan dari VR inilah yang akan kita atur agar sensor proximity dapat menyesuaikan dengan kondisi cahaya ruangan.
agar dapat dibaca oleh mikrokontroler maka tegangan sensor harus disesuaikan disesuaikan dengan level tegangan TTL,yaitu 0-1 Volt untuk logika 0 dan 3-5 untuk logika 1,hal ini bisa dilakukan dengan memasang operasional amplifier yang difungsikan sebagai komparator.output dari photodioda ini yg masuk ke input inverting op-amp akan dibandingkan dengan tegangan tertentu dari VR (Variabel Resistor).Teganagan dari VR inilah yang akan kita atur agar sensor proximity dapat menyesuaikan dengan kondisi cahaya ruangan.2.Algoritma Pergerakan robot
sebelum membuat program yang pertama dilakukan adalah mendefinisikan seluruh kemungkina pembacaan sensor proximity
gambar kemungkinan :

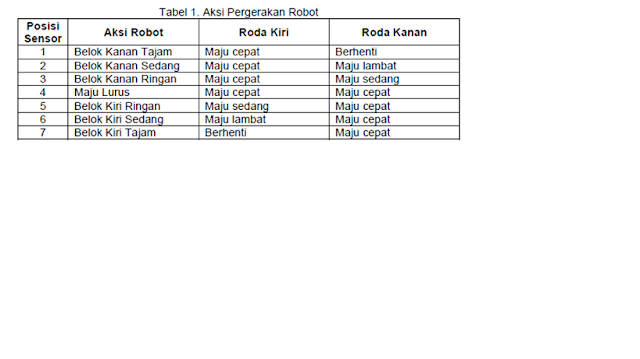
setelah mengetahui kemungkinannya selanjutnya kita harus mendefinisikan aksi dari setiap kondisi tersebut.
3.Driver Motor DC
untuk menggerakan dua motor DC digunakan IC H-Bridge Motor Driver L298,yang mampu memberikan arus maksimum sebesar 1A ke tiap tiap motor.input L298 ada 6 jalur,yg terdiri dari input data arah pergerakan motor dan input untuk PWM (Pulse width Modulation).untuk mengatur kecepatan motor,pada input PWM akan diberikan lebar pulsa yang bervariasi dari microcontroler.
4.AVR Microcontroller
sebagai 'otak' robot digunakan microcontroler AVR jenis ATmega 8535 yang akan membaca data dari sensor proximity,mengolah,lalu memutuskan pergerakan robot tersebut

pada robot,keluaran sensor proximity dihubungkan ke PortD.0 dan PortD.5 pada microcontroler.sedangkan driver motor dihubungkan ke PortC.0 s/d PortC.5
untuk selanjutnya pembuatan source code melalui software CodeVisionAVR.
5.Track

Spoiler for Yang mau download CodeVisionAVR:
Spoiler for Picture:


Spoiler for Buka:
sekian info dari ane gan,mohon maaf jikalau berantakan dan kurang lengkap untuk infonya,ane cuma ingin share aja
Spoiler for Sumber:
-Gambar : Google
-Materi : Modul & Buku Kampus (kebetulan ane kuliah elektro jadi ada bukunya
 )
)
Spoiler for Jangan Lupa:

Spoiler for TS Menerima:
")
Spoiler for TS Menolak:
")
Spoiler for Jangan Lupa:

APALAH ARTI MEMBUKA THREAD TANPA MENINGGALKAN JEJAK
Diubah oleh oktav14 09-10-2013 20:45
0
4.3K
23
Komentar yang asik ya
Urutan
Terbaru
Terlama
Komentar yang asik ya
Komunitas Pilihan